Применение синхронного ВВ для коммутации группы двигателей
УДК 621.316.57.032.46
Применение синхронного вакуумного выключателя для коммутации группы двигателей
Ачитаев А.А., магистрант кафедры систем электроснабжения предприятий,
e-mail: ac-an-alec@mail.ru; Павлюченко Д.А., канд. техн. наук, доцент, заведующий кафедрой систем электроснабжения предприятий, e-mail: d_pavluc@mail.ru; Прохоренко Е.В., канд. техн. наук, доцент кафедры систем электроснабжения предприятий, e-mail: evgprox@gmail.com; Шевцов Д.Е., аспирант кафедры систем электроснабжения предприятий, e-mail: dmitriy_shevtsov@mail.ru;
Новосибирский государственный технический университет,
630073, г. Новосибирск, пр-т К. Маркса, 20
Отражены различные алгоритмы синхронной коммутации группы двигателей и найден оптимальный алгоритм, позволяющий снизить уровень перенапряжений с 3,5·Uном до 1,2·Uном и исключить броски момента на валу двигателя. Исследовано применение схемы промежуточного питания через инвертор при одновременном включении в сеть группы двигателей. Показаны возможности снижения негативных последствий переключения питания от инвертора к сети путем реализации синхронной (управляемой) коммутации.
Ключевые слова: синхронная, коммутация, выключатель, вакуумный, асинхронный, двигатель, перенапряжения.
Вакуумные выключатели в настоящее время являются приоритетно рекомендуемым коммутационным оборудованием для использования в сетях средних классов напряжения. В то же время уровень развития современной элементной базы силовой электроники и микропроцессорной техники позволяет разрабатывать новые более точные и быстродействующие системы управления коммутационной аппаратуры. В продолжение предыдущей работы авторов [1] и в развитие исследованных ранее положений синхронной вакуумной коммутации рассмотрим задачу пуска каскада двигателей.
Одной из таких актуальных задач эффективной комбинации современных коммутационных аппаратов и микропроцессорных технологий является задача пуска каскада двигателей. На рис. 1 приведена схема пуска группы асинхронных двигателей. При одновременном их включении в сеть возникают перенапряжения, сопровождаемые большими бросками тока и момента. Для ограничения бросков тока применяется схема промежуточного питания через инвертор [2]. Однако, эта задача полностью не решается и при переключении питания от инвертора к сети возможны броски момента и тока, негативно сказывающиеся на электротехническом оборудовании.
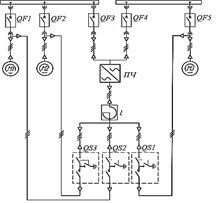
Рис. 1. Схема каскадного электропитания двигателей:
QF1-QF5 – вакуумные выключатели; ПЧ – преобразователь частоты; QS1-QS3 – разъединители; L – реактор; M1-M3 – асинхронные двигатели
Для снижения вышеупомянутых последствий существуют решения по организации переключения через специальный вакуумный выключатель, например, технологии TOSHIBA MITSUBISHI-ELECTRIC INDUSTRIAL SYSTEMS CORPORATION на базе инвертора TMdrive-MV [2]. Данная схема позволяет реализовать переключение группы двигателей, питающихся через инвертор, с последующим переключением на сеть без бросков тока и перенапряжений. Но в силу причин, связанных с узкой направленностью данного оборудования, такой вариант аппарата не позволяет его широко применить.
В данной работе решение задачи предполагается с использованием управляемого (синхронного) вакуумного выключателя [3, 4].Для детального анализа влияния коммутаций при переключении синхронных вакуумных выключателей на электромеханические характеристики рассмотрим принципы векторного управления асинхронных двигателей.
Описание системы управления асинхронных двигателей
В основу положено уравнение электромагнитного момента асинхронного двигателя [5]:
,
(1)
где – число пар полюсов машины;
k1, k2– коэффициенты электромагнитной связи статора и ротора;
σ – коэффициент рассеяния;
– взаимоиндуктивность статора и ротора;
θ– пространственный угол между векторами потокосцеплений статора Ψ1 и ротораΨ2.
Если модули векторов и поддерживать постоянными, то величиной момента можно управлять, изменяя угол θ.
При питании асинхронного двигателя от автономного инвертора напряжения, собранного по трёхфазной мостовой схеме (рис.2), в зависимости от состояния ключей возможно формирование восьми базовых пространственных векторов . Причём, векторы являются нулевыми и соответствуют короткому замыканию обмоток статора чётными или нечётными ключами.
Из уравнения статора асинхронного двигателя в неподвижной системе координат можно определить связь между векторами напряжения и потокосцепления:
(2)
где – пространственный вектор напряжения инвертора;
– ток статора;
–сопротивление статора.
(3)
Полагая и переходя к конечным разностям, получим:
.
(4)
где – приращение потокосцепления статора;
– длительность межкоммутационного интервала.
Отсюда видно, что вектор приращения потокосцепления статора совпадает по направлению с вектором напряжения u1 и пропорционален длительности его формирования.
В асинхронном двигателе электромагнитная постоянная времени ротора T2 в 1,5-2,5 раза больше постоянной времени статораT1. Поэтому, если длительность межкоммутационного интервала Δt = T1<T2, то при качественном анализе можно считать, что потокосцепление ротораΨ2 после коммутации ключей инвертора остается практически постоянным, а изменяется толькоΨ1. Следовательно, выбор базового вектора, формируемого инвертором, определяет не только изменение модуля потокосцепления статора, но и угла между векторамиΨ1иΨ2, т. е. приращение электромагнитного момента Δm кΔθ [5].
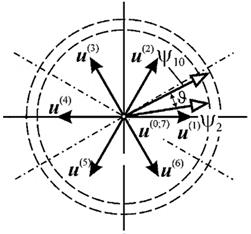
Рис.2. Положение векторов системы управления моментом асинхронного двигателя:
Ψ10 – начальное значение вектора потокосцепления статора; Ψ2 – вектор потокосцепления ротора; – пространственные вектора напряжений;